|
Zhuoqun Chen I'm a first-year PhD student at Duke University advised by Prof. Boyuan Chen. Prior to that, I got my M.S. in Electrical and Computer Engineering at UC San Diego, advised by Prof. Xiaolong Wang. I've also been fortunate to work with Prof. Hao Su and Prof. Chen Wang before the doctoral study. I'm interested in making robots interact with the physical world and complex environments with human-like intelligence by exploring from various data. |

|
{kind=link}
Publications & Preprints* indicates equal contribution |
|
Responsive Noise-Relaying Diffusion Policy: Responsive
and Efficient Visuomotor Control
Zhuoqun Chen*, Xiu Yuan*, Tongzhou Mu, Hao Su TMLR, 2025 ICLR Generative Models for Robot Workshop, 2025 project page / arXiv / Code By utilizing action queue of increasing noises and sequential rollout, we enable responsive (higher success rate in envs with rich contact dynamics) and efficient (1 NFEs / action) action generation. |

|
VL-Nav: Real-time Vision-Language Navigation with Spatial Reasoning
Yi Du, Taimeng Fu, Zhuoqun Chen, Bowen Li, Shaoshu Su, Zhipeng Zhao, Chen Wang arXiv, 2025 project page / arXiv We propose a real-time zero-shot vision-language navigation approach with spatial reasoning that integrates pixel-wise vision-language features and curiosity-based exploration for robots. |
|
Generalized Animal Imitator: Agile Locomotion with Versatile Motion Prior
Ruihan Yang*, Zhuoqun Chen*, Jianhan Ma*, Chongyi Zheng*, Yiyu Chen, Quan Nguyen, Xiaolong Wang CoRL, 2024 CoRL Deployable Workshop, 2023 (Best Paper Award) project page / arXiv Our system learns a Single Instructable Motion Prior from a diverse reference motion dataset. |
Miscellaneacoursework, toy projects and some random stuff |
|
Finding an Optimal Path in Grids via Dynamic Programming
Course Project report By formulating a minigrid path planning as a deterministic optimal control problem, it can be easily solved using dynamic programming algorithm. |
|
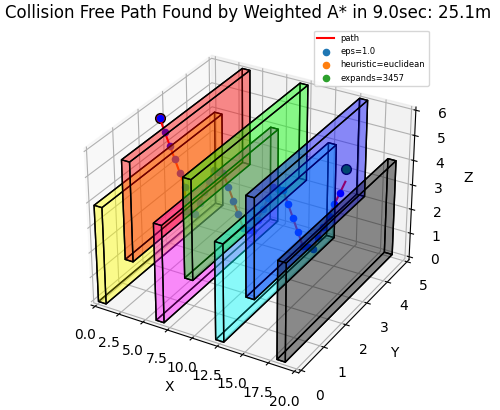
Search-based and Sampling-based Motion Planning in 3D Euclidean Space
Course Project report Solving simple planning problems in 3D space using A*, RRT, and their variants. |
|
|
Trajectory Tracking via CEC and GPI Approaches
Course Project report Solving a periodic reference trajectory tracking problem using Model Predictive Control (MPC) and Generalized Policy Iteration (GPI). |
|
Generalist-Specialist Learning
Course Project With Jun Wang, a project to validate a simple idea, that is, demonstrations collected from specialist policies can help improve base models that are already stucked in a local optimum. |
Professional ServiceConference reviewer for CoRL 2025; CVPR 2025; ICRA 2024, 2025, 2026. |
|
Template borrowed from Jon Barron's website. |